


开云真人无刷电机常用的位置检测方法
作者:小编 发布时间:2023-11-21 19:58:11点击:
上一篇文章我们讲了一些无刷电机的基础知识,包括无刷电机的内部结构,驱动原理等,我们知道了只需要按照转子的当前位置,来按顺序给定子线圈通电,就能让电机转动起来。
但是,上一篇中我们跳过了一个关键步骤,就是如何检测转子的位置。本篇我们就讲讲常用的位置检测方法,以及引出的一些相关问题。
.jpg)
我们知道,获取磁铁的位置可以用霍尔传感器,无刷电机的转子就是永磁体,因此只要在合适的位置安装霍尔传感器,就能知道转子的旋转位置。
在无刷电机中,一般用3个开关型霍尔器件就能检测转子的位置。霍尔的安装位置可以相隔120°,也可以相隔60°,我们以下图3N2P型电机,霍尔相隔120°的安装方式为例:
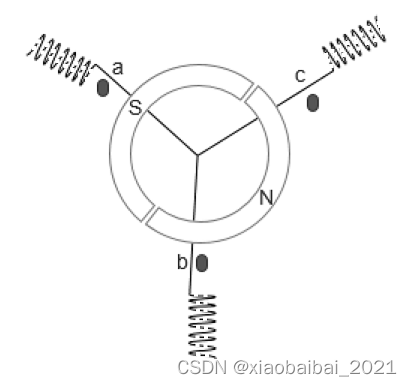
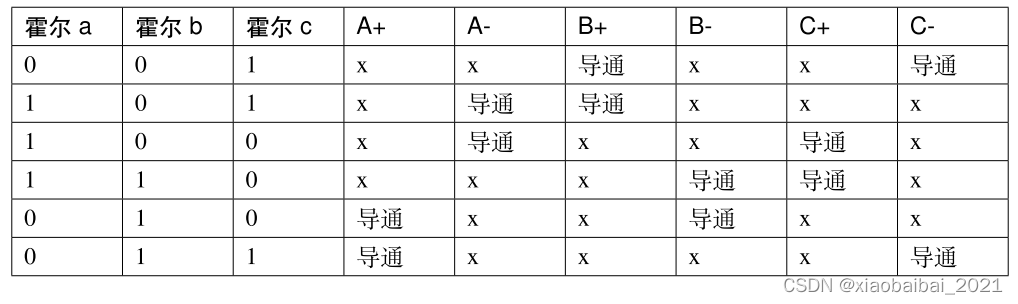
a、b、c是三个霍尔传感器。当N极接近霍尔a时,a输出高电平1;当N远离a时,a输出低电平。同理b、c也是一样的特性。
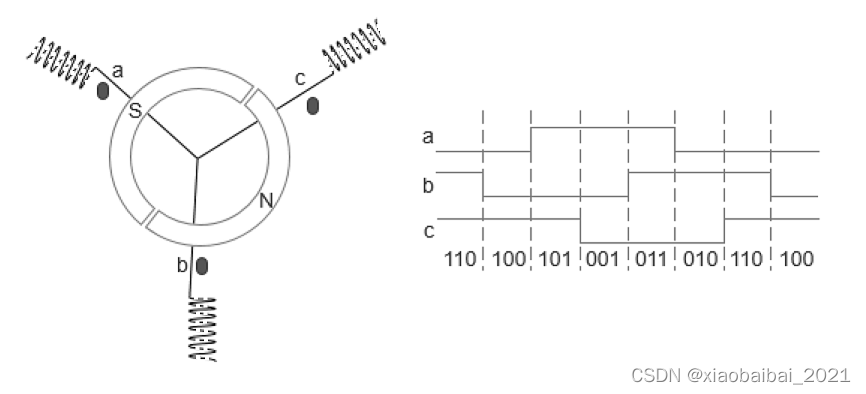
因为2P的转子是一对极,所以在转子逆时针转动一周时,a、b、c霍尔的输出波形就都会高低电平变化一次,如下图所示:
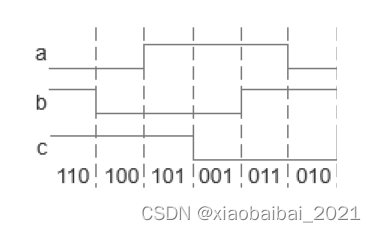
这样我们通过霍尔传感器的输出,可以确定转子的当前位置,再结合上一篇讲的方法,就可以使它转动起来了。
如果我们想使用“二二导通”的方法让它逆时针转动,在图中位置cba = 110,则应该使得B线圈加正电压C线圈加负电压A悬空;这个加电状态保持到N极转到接近c位置时,霍尔输出会自动变为cba = 100,则我们的加电状态应该变为A线圈加正电压C线圈加负电压B线圈悬空,才能让转子继续逆时针转动。
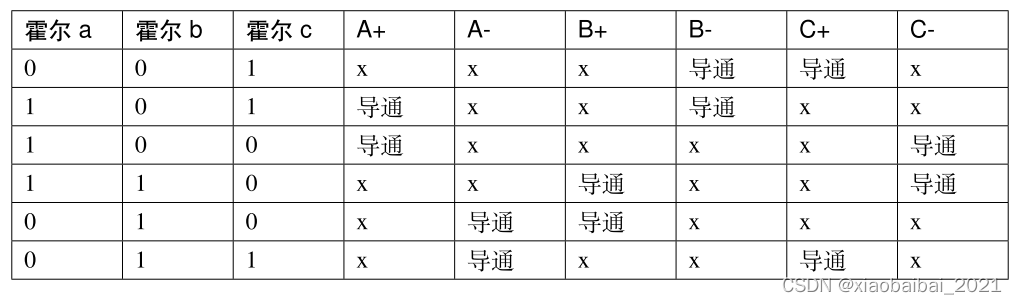
不难发现,三个霍尔的输出在一个周期内是6个状态,正好对应了“二二导通”法电机转动一圈时对线个状态。
于是,我们只需要用abc三个霍尔的输出来控制ABC三个线圈的加电状态,就能控制电机连续地转动起来了。
关于有传感器的位置检测,还有许多其他方法,如编码器、光电传感器、旋转变压器等等。后续小白白会专门写一篇文章讲解。2)无传感器(检测反电动势)驱动
在一些微、小电机系统中,安装位置传感器对电机的体积和成本会有不利影响,因此,无传感器的位置检测技术也非常有实用价值。我们先来讲解它的原理,再聊聊它的优缺点。

对比一下上节中有传感器的驱动方式,在这个位置,是B线圈加正电压C线圈加负电压A线圈悬空。
电机的转子磁铁在转动时,显然在A线圈上会有产生一个感应电动势。假如当转子磁铁转动时,S极先接近线圈A,然后从另一边远离线圈A,在线圈A中产生的感应电动势就会有一个由正变为负的过程(或者由负变正),也即是感应电动势会有一个过零点。(注意一下,这里的感应电动势过零点,是以三个线圈的中心连接点为参考点的)。
所以,我们可以在电机转动时,检测不加电的那一相的感应电动势得过零点,就能知道转子的位置了。
检测过零点的方法有很多种,可以用比较器,如下图的电路,是检测其中一相的示例:
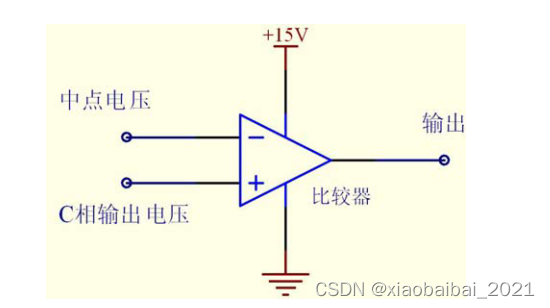
注意图中的中点电压,一般无刷电机是不会把中点引出来的,要通过其他方式获取,可以用三相线串电阻后连到一起得到。下图是一种经典的获取中心点电压的方法,左边是三相线上取的电压,右边输出是中心点和三相过零的检测点:
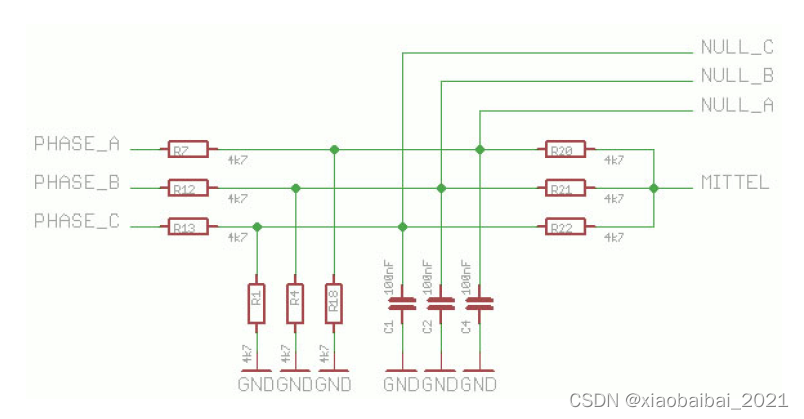
另外,电机转动起来时、以及用PWM控制时,都会产生很多干扰,在过零比较时需要加入滤波电路,上图中的电容就是一种简单的滤波方法,但是要注意,加电容滤波以后会造成电压的相位滞后,所以电容值不能过大。如果是通过软件采集后再判断过零点,也可以通过软件来滤波。
检测到转子的位置,就可以据此进行换向了,最佳换向位置是在过零点之后30°。那么如何知道转过30°需要多长时间呢?
通常的方法,是近似认为转子的转速是均匀的,从上一次换相到本次过零的时间,就约等于本次过零到下次换相的时间。由此,我们只需要用单片机进行计时,就可以知道近似的30°的换向位置。
另一种更加简单直接的方法,是在检测到过零点后,立即进行换向,这种方法换向位置不是最佳的,会损失一些效率,但是设计起来最简单。
但是,此时又出现了一个新问题,在初始启动、转子还没有转动时,磁铁和线圈没有相对运动,线圈里是没有感应电动势产生的,那该怎样确定转子的位置呢?我们看下一节,无传感器电机的启动问题。
由于无传感器的模式,需要靠感应电动势来判断转子的位置,所以电机刚开始启动时,或者转速很低时,感应电动势很小,是无法用来检测位置的。所以无传感器的无刷电机的启动是个难点问题。
一般的方法是采用三段法启动,即先预定位,再启动加速,最后进入闭环控制。具体的实现方法如下:
就是先给某两相通电一小会儿,让转子转到预定的位置;这个通电时间、占空比需要依据不同的电机和负载情况确定;否则可能会由于长时间在一个线圈上加电烧坏,或者时间太短不能预定位。
就是依据所要转动的方向,依次给各相加电(换相);启动的过程,需要多次换相,并逐渐加速;同样的,这个加速过程也与具体的电机和负载相关,需要测试来确定,换相频率太低,电机加速慢,线圈也会发热严重;换相频率太高,电机运行起来容易失步,导致加速失败。
常见的加速有三种方式:恒频升压法、恒压升频法、升频升压法,字面意思就可以理解,就不多解释了;如某些航模电调,加速时,每次延时时间比上一次减少1/25,直到电机完全转起来。
当启动加速到一定转速时,反电动势及其过零点可以被稳定的检测到时,就可以切换到闭环控制状态,也就是按上一节的控制逻辑进行换相驱动了。
由无感驱动的方法可以看出,它的启动是比较复杂的,在低速运转时感应电动势较小时也运行困难,所以无感无刷电机不合适用在频繁启停、低速运转的场合,而比较适合用于体积、成本受限、运行速度比较高的场合。
通过上述讲解,我们知道了,无论是有感还是无感无刷电机,在转动时,是靠转子的位置去确定下一时刻的通电状态,而转到下一个位置的时间只与供电电压相关,所以,无刷电机调速时,最简单得方法是调整供电电压,或者使用PWM控制。
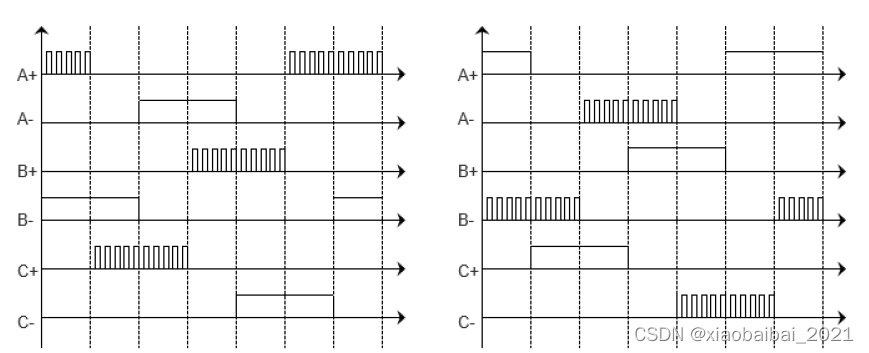
使用PWM控制时,常用的方法是在导通区间内,上下桥臂其中之一恒通、另一半用PWM控制,如下图所示,左图是下桥臂恒通上桥臂PWM控制的方式,右图是上桥臂恒通下桥臂PWM控制的方式:
1 恒流源阻值检测电路 恒流源法是指向电阻Rx(电阻式位置传感器阻值)提供恒定电流Is,通过测量输出端电压Ux可以计算出电阻值Rx的方法,如图1所示。输出电压关系式为 恒流源的产生方法很多,本文利用运算放大器OP07产生,如图2所示,由OP07组成负反馈电路,正相输入端为固定电压Ui,则反相输入端也为Ui,由于OP07的输入阻抗极高,输入端可以认为不吸入电流,因此从R电阻上流过的电流大小固定,而且一定等于OP07输出端流过电阻Rx的电流,由此得出电流Is的关系式为 但实际使用中发现,恒流效果并不理想,究其原因是运算放大器正相输入端电压的稳定性不好造成的。解决的办法是利用高精度的恒压源AD581
电路设计 /
激光切割加工具有切割精度高、切割速度快、热效应低、无污染、无噪音等优点,在汽车、船舶、航空航天和电子产业中 都得到了广泛的应用。而激光切割加工质量与激光焦点与工件之间的相对位置有着密切的关系,保证激光焦点和切割对象之间的公道的相对位置是保证激光切割加工 质量的关键之一。 激光聚焦的焦点位置无法直接丈量,但可以通过间接方法检测。对于一个激光切割加工系统,其焦点位置是由聚焦镜的光学焦点 决定的,所以在聚焦镜一定情况下其位置是不变的(不考虑聚焦镜的热效应),因此可以通过检测聚焦镜和被加工对象之间的相对位置来间接检测焦点和被加工对象 之间的位置关系。 激光焦点和被加工对象之间的相对位置可以通过电感位移传感器和电容传感器
方法 /
摘要: 电子调速器是将直流电转化成交流电驱动无刷电机的一种电子装置,简称 电调 。它具有调速和功率驱动两种基本功能。通常电调有3组功率场效应晶体管 (MOSFET)构成桥型驱动电路。由于电路中总是存在传输线路的差异、分布电容差异、器件延时差异等不确定因素影响,常常使得桥臂上下两只MOSFET管的导通或截至时间不同步。极易出现同一个桥臂中上下两只MOSFET出现短暂同时导通的情况,从而出现短时大电流脉冲。这个问题降低了电源效率,也容易使驱动管发热损毁。本文通过使用任意波发生器对电子调速器进行驱动和测试,在精准测量出各路桥臂时延特性后,经过驱动软件优化让电路达到了最佳控制效果。泰克AFG31000任意波发生器可产生任意脉冲波,具有双通
调速器我可以 /
节能减排的议题在全球各国不断受到重视,美国 EPRI指出,全球电机所耗费的金额一年高达 950 亿美金,占所有电力 51%。无论是工业、家庭还是商业用电,电机消耗的能源都占有很高比例。如果改善电机系统的输出、输入功率比,就可以提高用电效率。而无刷直流电机具有高效节能、控制特性好、可靠性高、寿命长、噪音低等优点,正在越来越多的家电领域取代交流电机。与传统的交流电机相比,直流电机的效率有大幅度提升,尤其在低转速区也能进行高效率运转,提高了系统能效比。 针对节能减排全球化趋势,大联大世平推出NXP、Toshiba 微处理器直流无刷电机控制方案,旨在提供更加快速、简便、高精度和高灵活度的电机控制方案。 图示1-
无刷电机的工作原理依旧可以想象一个圆柱体,不过这次不是小圆棒在中间转,而是一个块儿吸铁石在中间转,柱壁不在是吸铁石的两个磁极,而是刚才通了电的“扇叶”。这样只要一通电,柱壁因为电磁有了磁极,和中间的吸铁石产生互斥力,然后吸铁石疯狂转,电能就此转化为动能。它与有刷电机最大的区别就是,就不用那俩电刷通电了,因为我们可以直接给柱壁通电。 这样好处就很明显了,因为没有那个电刷摩擦了,所以速度也更快了,损耗也减小了,输出功率更大了,电机的也寿命长了,还不产生火花呐,这对于一些在易燃位置的电器来说简直就是福音。 无刷电机优点: (1)无电刷、低干扰 无刷电机去除了电刷,最直接的变化就是没有了有刷电机运转时产生的电火花,这样就极大减少了
的工作原理及优势是什么 /
1引言 基于电磁感应原理的旋转变压器(Resolver)是一种精密微控制电机,在雷达天线角位置伺服系统中,完成轴角位移信息的检测功能。由于它是模拟机电元件,所以,用于计算机控制的数字伺服系统中,就需要一定的接口电路,即旋转变压器-数字变换器(RDC),以实现模拟量信号到控制系统数字量的转换。随着电子技术的飞速发展,美国AD公司已将它发展成为一系列的单片集成电路,从而弥补了过去由分立元件搭成的RDC体积大、可靠性低的不足,给工程应用带来了极大的方便。由旋转变压器和AD2S83就可以构成高精度的雷达天线角位置检测系统,而且AD2S83输出的模拟速度信号还可以作为速度反馈信号以构成雷达伺服系统中的速度回路。 2
系统及其在雷达伺服系统中的应用 /
0 引言 在电机的闭环控制系统中,由于需要实时获得电机的位置和转速信息,高速、高精度的传感器以及相应的处理电路是必不可少的。光电编码器输出数字信号,容易实现高分辨率、高精度的检测,在现代电机检测技术中得到了广泛的应用。TI公司2000系列的DSP是目前控制领域最先进的处理器之一,其最新产品的工作频率高达150MHz,大大提高了控制系统的控制精度和实时处理信息的能力,其特有的QEP电路和光电编码器的配合使用为电机位置和转速测量提供了完美的解决方案。 1.DSP/QEP电路简介 以TI公司控制领域最新产品TMS320F2812为例,它的正交编码脉冲(QEP)电路和捕获单元共用输入引脚,分别为CAPl/QEPl、CAP2/QE
和转速测量研究 /
根据驱动系统的不同,无刷电机具有不同的电流控制方法。此外,为了控制转速和产生的扭矩,需要控制电机电流的大小。在这里,我们将解释开云真人控制电机电流的 PWM 方法。 电流控制方式 称为PWM(脉冲宽度调制)的电气控制系统用作施加到电机绕组的电压的控制方法。PWM 控制是一种通过反复打开和关闭电路中的开关元件并产生脉冲状电压来控制输出电压的方法。 图 3.12 显示了直流电机的 PWM 控制电路模型。图 3.13 显示了 ON 阶段脉冲宽度变化(调制)时的电压波形和电流波形。 调制脉冲宽度并改变 ON/OFF 开关元件的占空比可控制平均电压。 此时,电感使电流滞后于增加的电压,当取消施加电压时,电流逐渐减小。 3.31调制方
电流控制方法 /
STC单片机原理及应用:从器件、汇编、C到操作系统的分析和设计:立体化教程 (何宾)
Cadence Allegro 16.6 -4层四路HDMI电路PCB设计教程
有奖直播 与英飞凌一同革新您的电动汽车温控系统:集成热管理系统(低压侧)
MPS 隔离式稳压 DC/DC 模块——MIE系列首发,邀你一探究竟!
ADI世健工业嘉年华——世健·ADI工业趴:票选心仪带盐人 活动开始啦
11月21日,玄铁RISC-V上新了三款处理器:首次实现AI矩阵扩展的C907、 满足Vector1 0标准的C920,以及实时处理器R910。...
11 月 20 日消息,据《证券时报》报道,日前有消息称,目前华为的鸿蒙 HarmonyOS NEXT 开发者预览开云真人版已不兼容安卓,华为可能明年推出 ...
AM335x是TI经典的工业MPU,它引领了一个时代,即工业市场从MCU向MPU演进,帮助产业界从Arm9迅速迁移至高性能Cortex-A8处理器。随着工业4 0 ...
贸泽电子开售可提升AI和显卡性能的Advantech VEGA-X110嵌入式GPU卡
2023年11月17日 – 提供超丰富半导体和电子元器件™的业界知名新品引入 (NPI) 代理商贸泽电子 (Mouser Electronics) 即日起供货Adva ...
当然,在此之前,英特尔的FPGA依然还要接受当今行业的挑战,诸如人工智能、安全等课题。11月14日,2023英特尔FPGA中国技术日上,英特尔详细解析了当前现状与未来FPGA的规划。...
MIKROE推出新开源软硬件解决方案使数百个Click板能够热插拔到Linux开发环境中

站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科

 QQ客服
QQ客服